

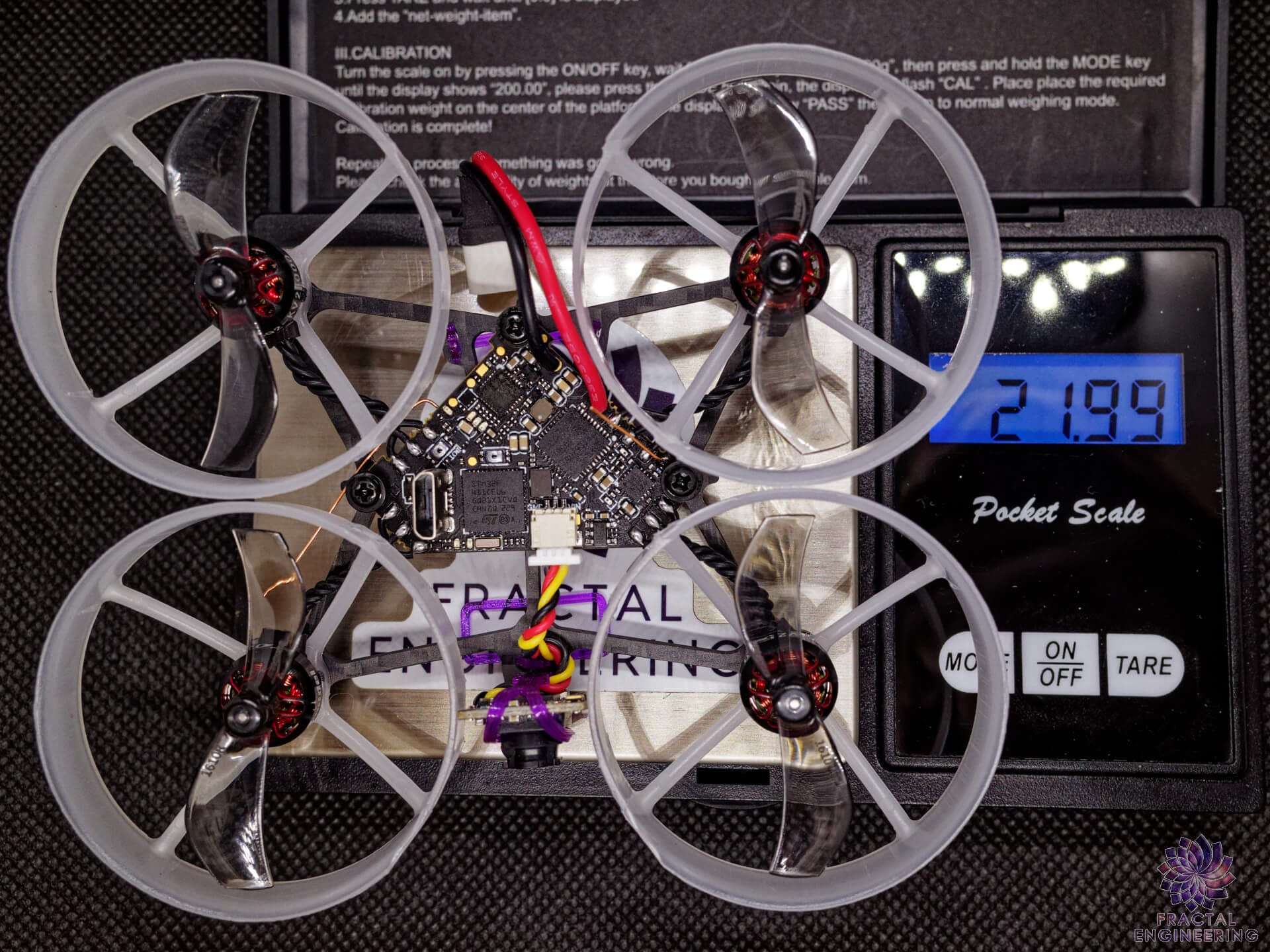
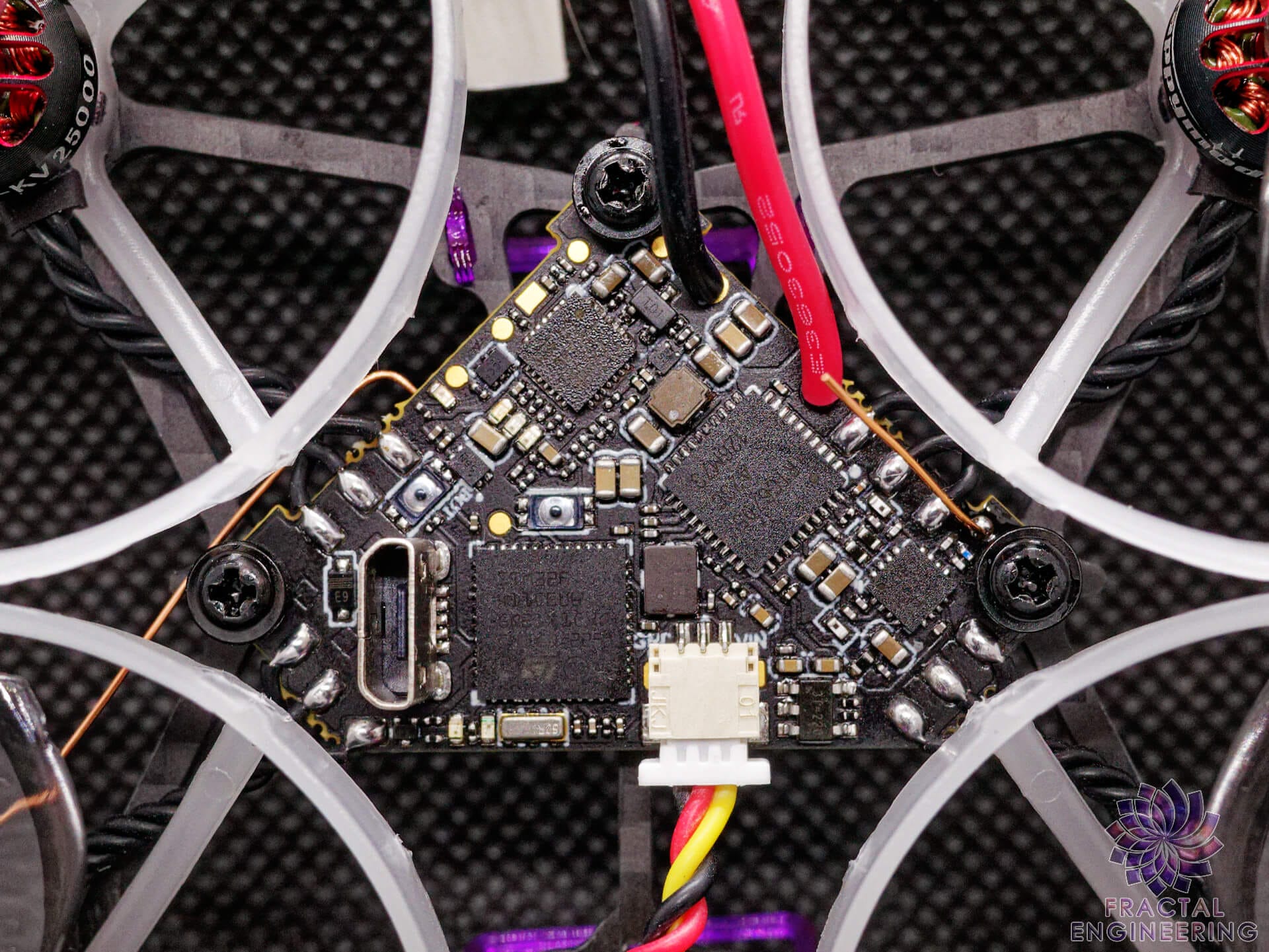
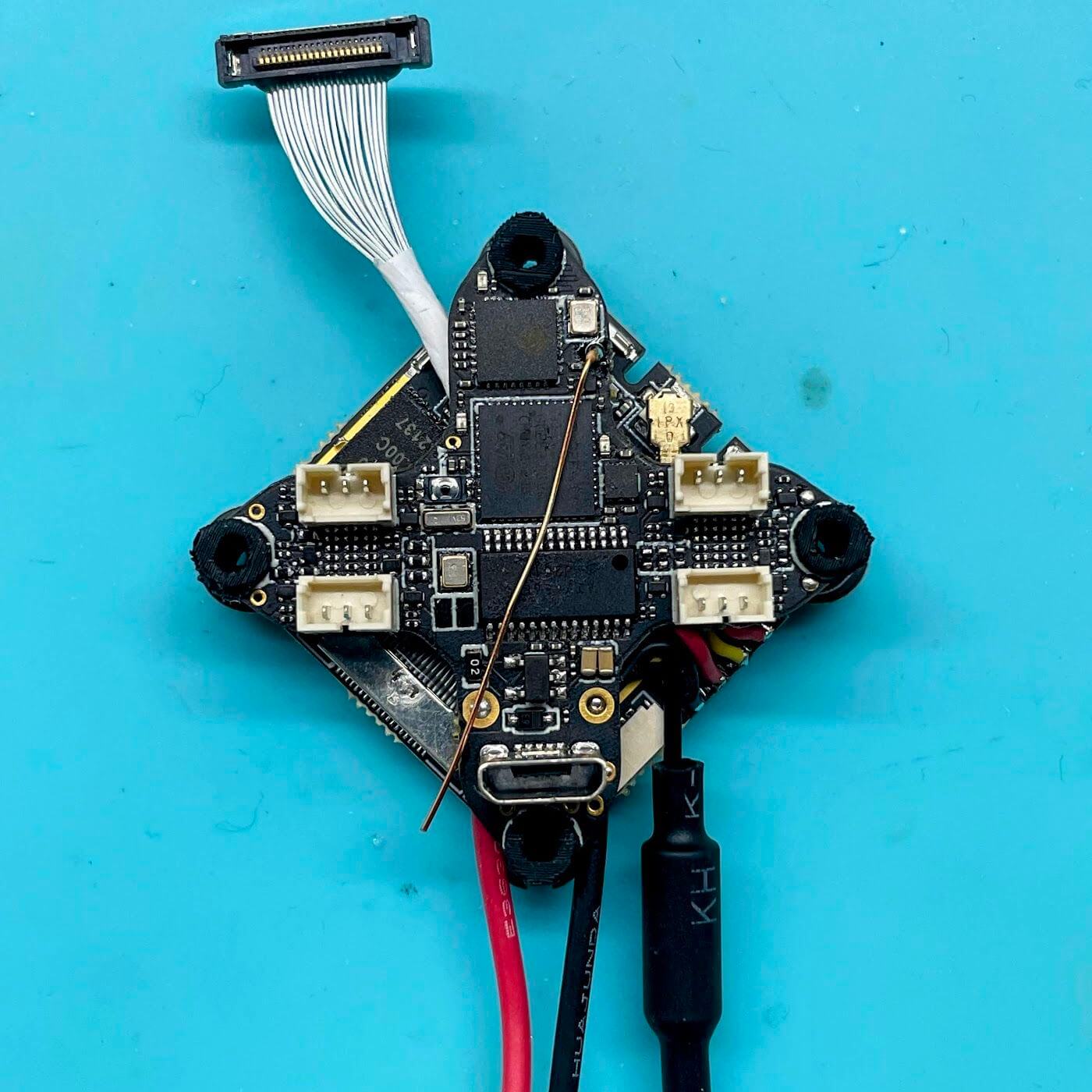
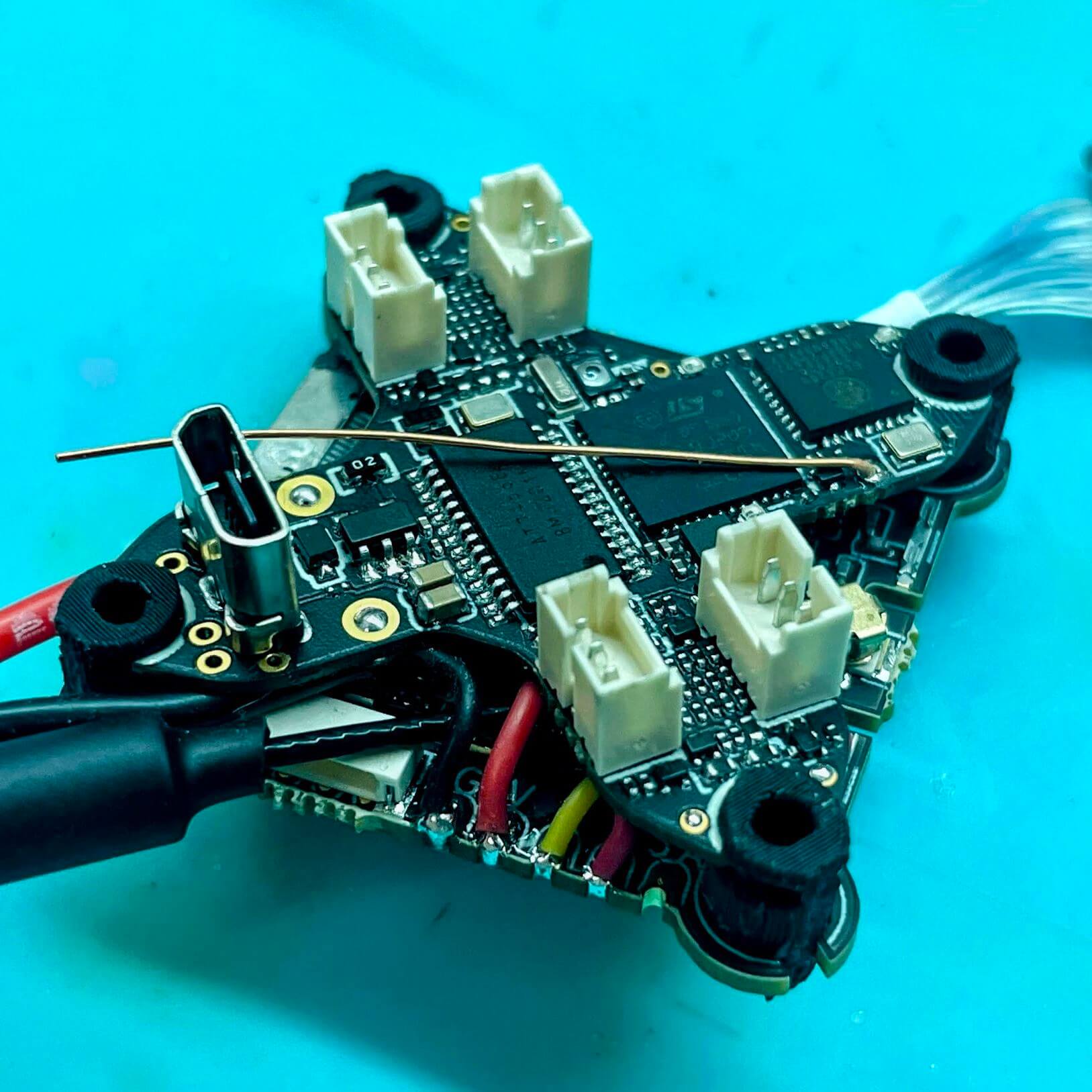
HM Diamond F4
Solder the pigtail on the top, through hole or flush to the board, extending backwards (cut gnd wire shorter)
Cut the motor wires. Distance from the edge of the bell:
- 23mm for F65, twisted 3-4x
- 25mm for F75, twisted 3-4x
Desolder Rx antenna, solder it back facing outwards, perpendicular to the FC edge. Trim to 31.2mm and fold forward right after the edge.
Desolder VTX antenna. solder it back on the top. Trim to 12.9mm. bend back along the FC edge, 45deg (should get up to right below the top of the duct.
Assemble the FC to the bottom plate, USB facing UP
Use short M1.7x5mm screws, short grommets
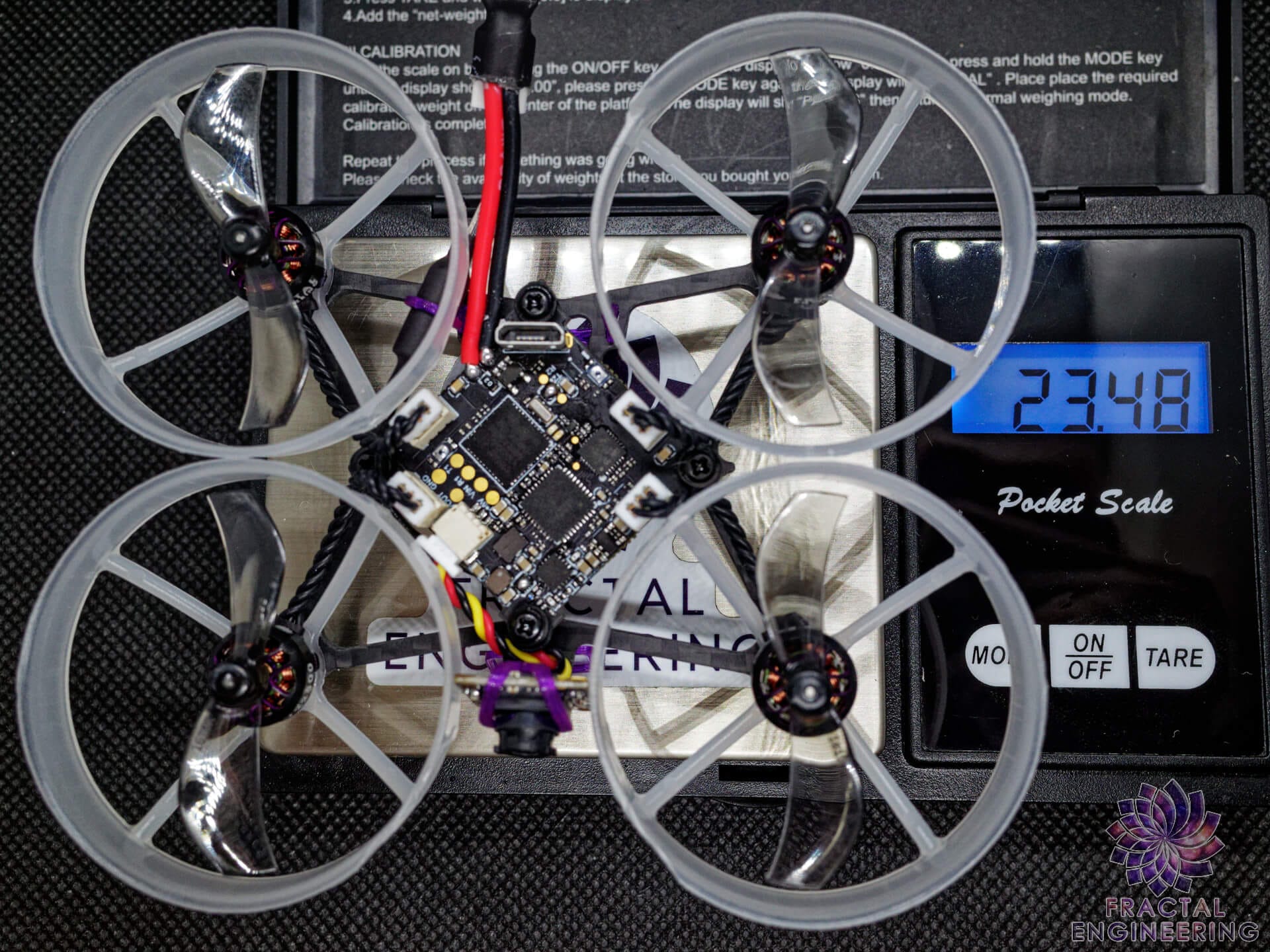
HM ELRS F4 2G4
Solder the pigtail on the top, through hole or flush to the board, extending backwards (cut gnd wire shorter)
Assemble the FC to the bottom plate, USB facing UP
Use long M1.7x6mm screws, cut the included grommets top and/or bottom to clear the CF but fit the screw
Twist the motor wires 4-5x and lay down along the CF braces
HM X12
Mount upside down, USB facing UP
Twist the motor wires 4-5x and lay down along the CF braces
Use long M1.7x6mm screws, cut the included grommets top and/or bottom to clear the CF but fit the screw

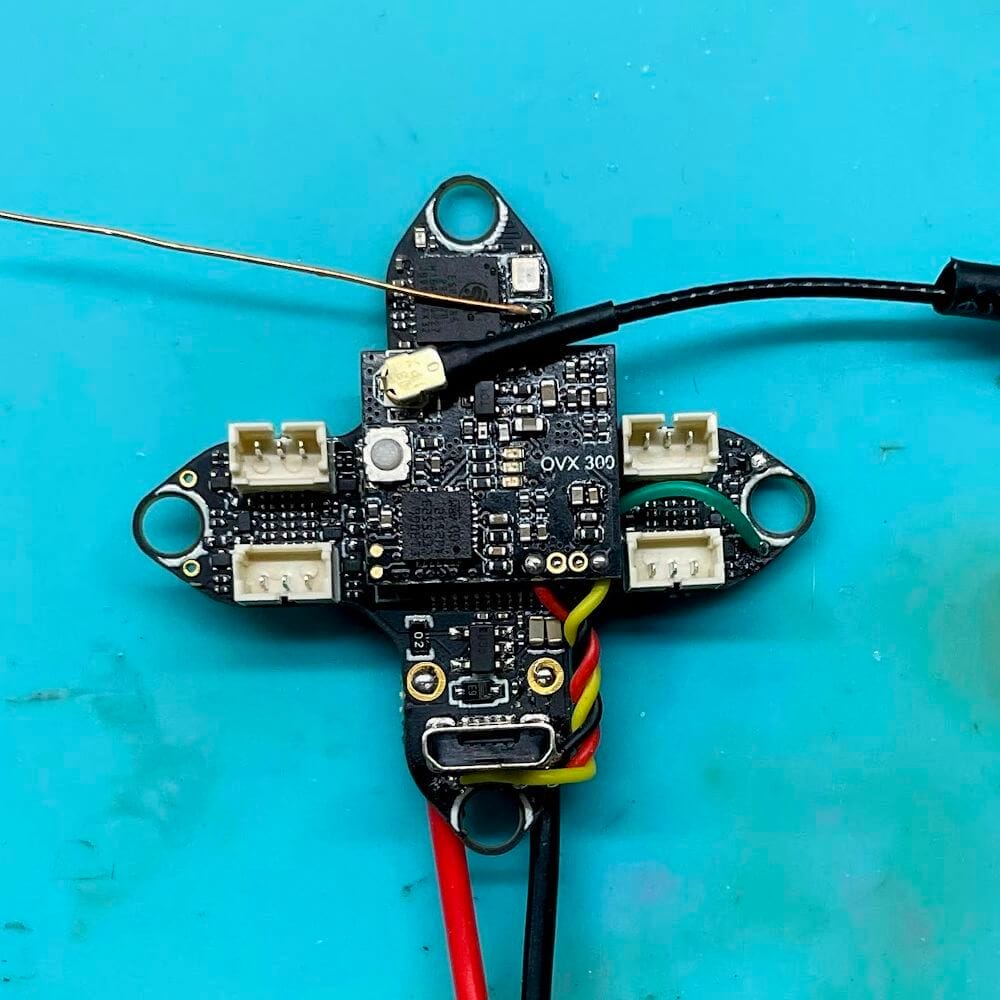
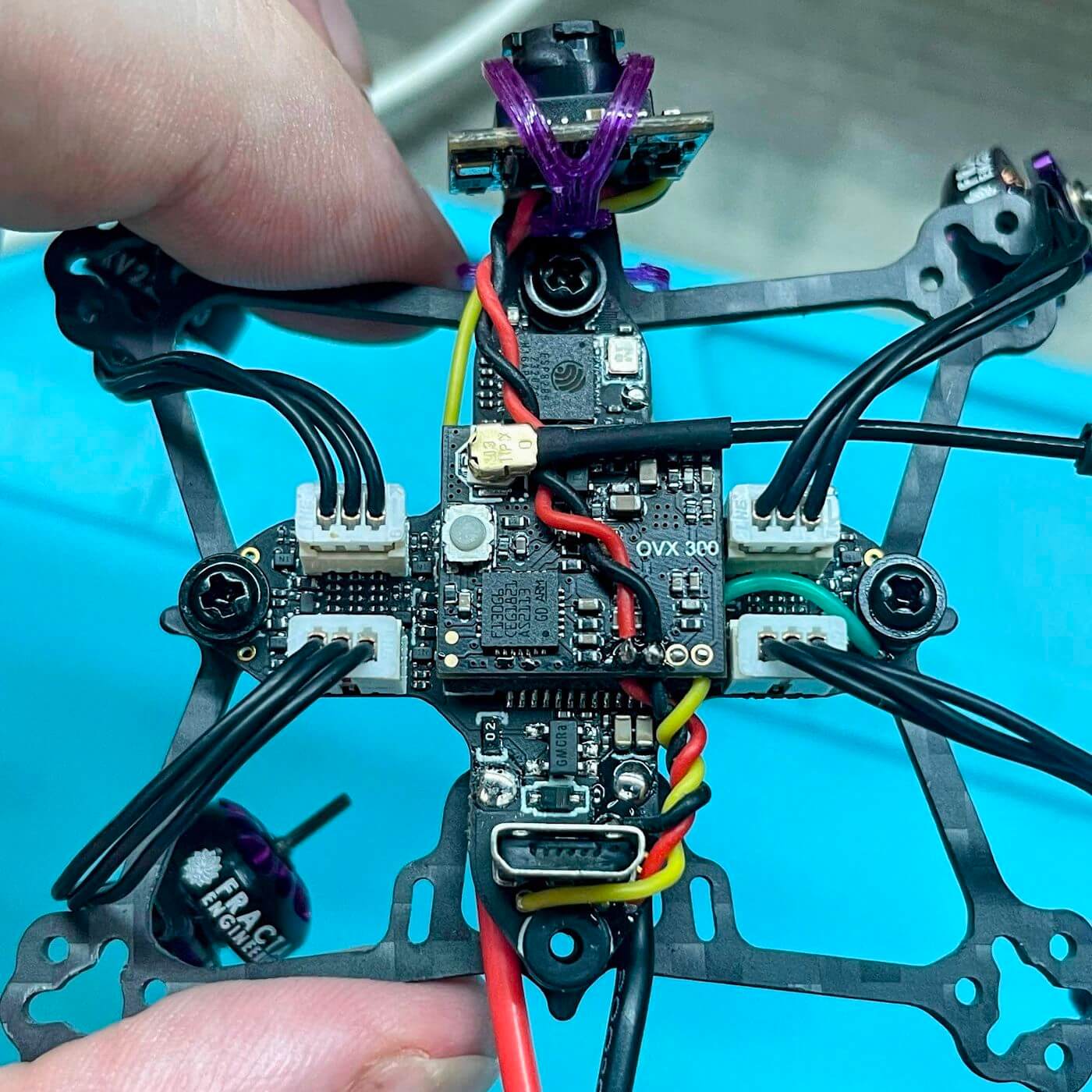
HM CrossF4 + OVX300
Solder the AIO pigtail flush on the bottom.
Solder the VTX wires on the bottom.
Stick the VTX on the AIO with VHB (trim the protruding top corners)
Wire the VTX. GND to the USB, then 5V, then video. And TX1 for SA/MSP
Assemble the FC to the bottom plate, USB facing UP
Use long M1.7x6mm screws, cut the included grommets top and/or bottom to clear the CF but fit the screw.
Or use short grommets with other grommets trimmings to shim it up and avoid contact with the CF
Install camera. You might need to replace/extend the yellow video wire by the one included with the FC to reach the VIN pad at the back (dumb I know)
Twist and solder the cam power leads to the VTX power
Twist the motor wires 4-5x and lay down along the CF braces
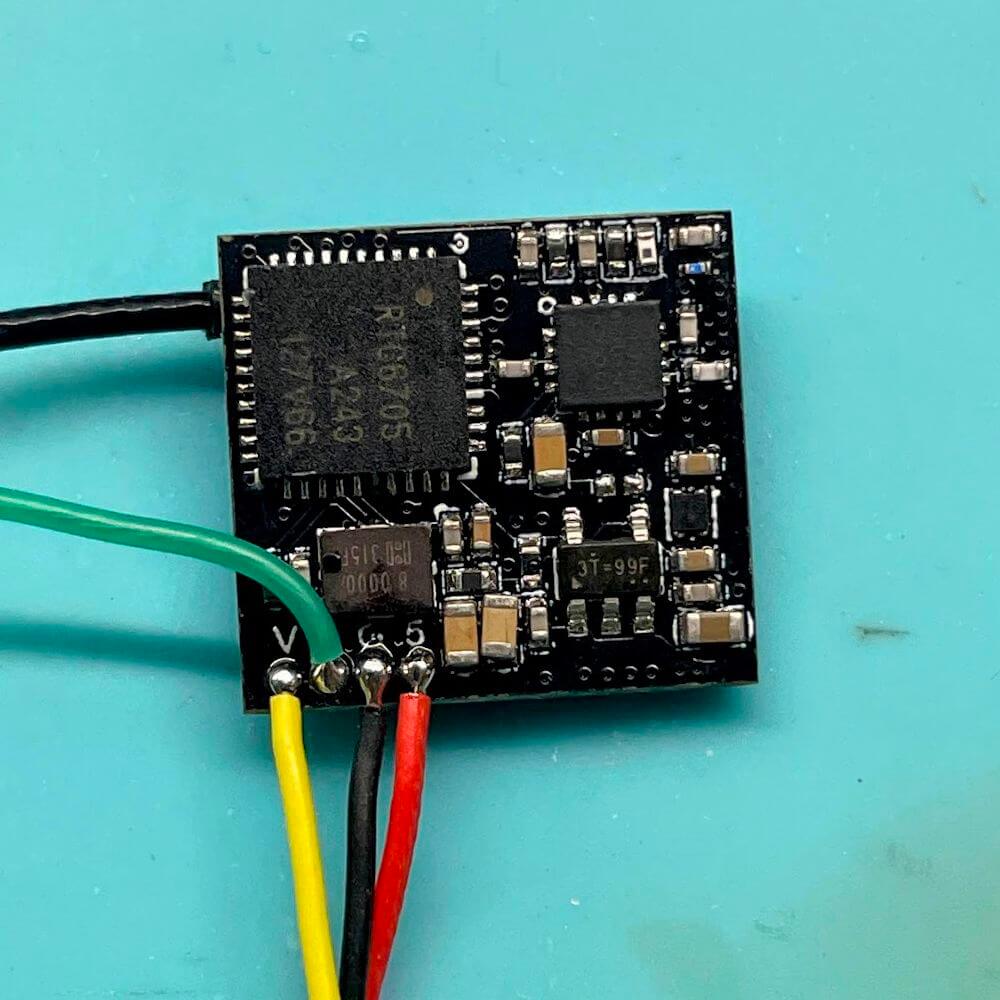
HM Superbee + HDZero Whoop Lite
Solder the AIO pigtail through hole or flush on the top, leading straight back (cut gnd wire shorter)
Trim the motors right at the connector and solder on the FC
TEST MOTORS
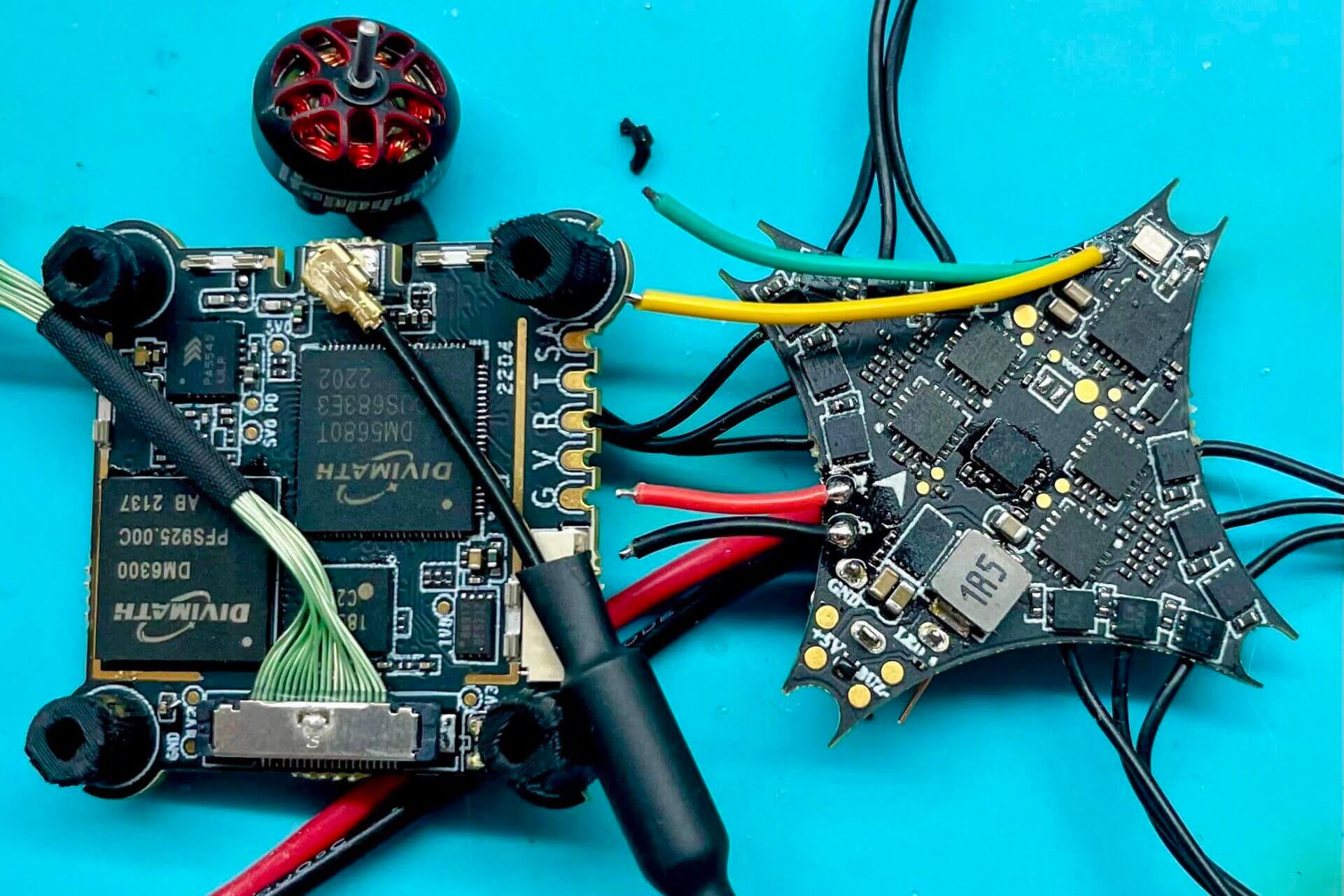
Place the VTX and FC as pictured below, with the VTX pads edge and the FC power edge facing each other
Solder on the power and uart 2 wires on the FC
Trim them about where they meet the VTX edge when placed side by side + 5mm
Install the HD grommets in the VTX with needle nose pliers (you might need to squish them a bit.)
Note they are directional; the wide slot goes on the VTX, and the flat surface facing outwards
The next step is easier if you only install the front and back ones first.
Snap on: the camera mipi (leading forward, to the left of the front grommet) and the antenna (leading backwards, to the right of the rear grommet)
Marry the FC and VTX together, and assemble the remaining 2 grommets.
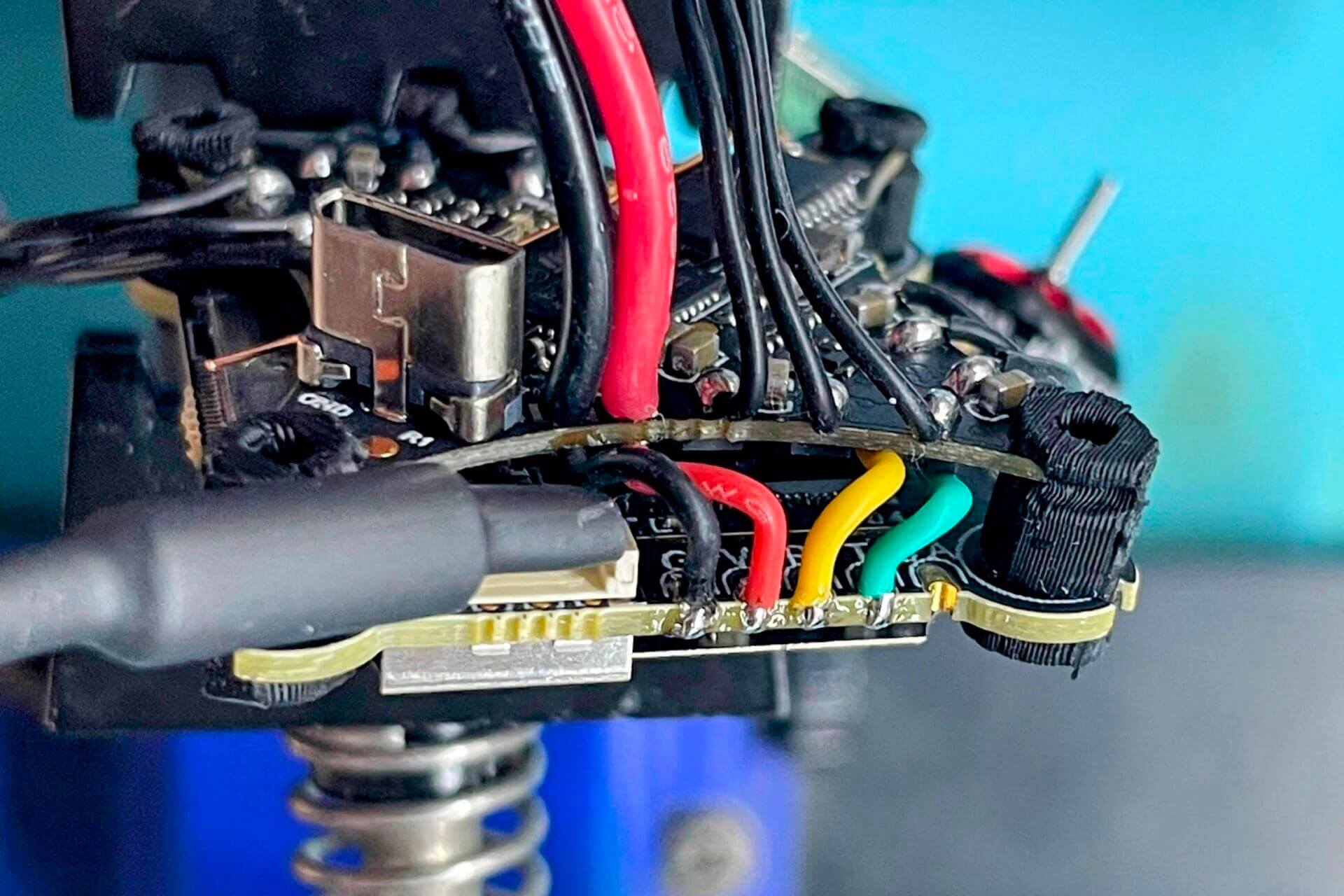
Solder on the VTX wires to the FC.
Assemble the stack on the bottom plate using the M1.7x10mm screws, FC on top, USB facing UP.

HM CrossF4 + HDZero Whoop Lite
- Prepare the board by trimming off the rings around the fixation holes, about where the white silk screen ends. File down the sharp edge to tidy it up.
- Snip off the USB ground pins next to the battery pads; I recommend smoothing it up by refreshing the cut with a little solder dome to avoid cut and wear on the pigtail
- Solder the AIO pigtail flush on the bottom, leading straight back.
- Solder on the vtx power leads to the same joints
– I recommend using a NC tweezer to hold the pigtail in place - Trim off the excess motor plugs flush with the mosfets if you decide to keep them (the plugs)
- Solder on the uart 1 wires
- Trim all the vtx wires about as pictured
- Install the HD grommets in the VTX with needle nose pliers (you might need to squish them a bit.)
– I recommend starting with only the front and back one, then the sides after marriage
– Also note they are directional; the wide slot goes on the VTX, and the flat surface facing outwards - Snap on: the camera mipi (leading forward, to the left of the front grommet) and the antenna (leading backwards, to the right of the rear grommet)
- Marry the FC and VTX together, and assemble the remaining 2 grommets.
- Solder on the VTX wires to the FC.
- Assemble the stack on the bottom plate using the M1.7x10mm screws, FC on top, USB facing UP.



{kind=link}
Duct Separation
I recommend starting with marking/numbering the ducts on the untouched plastic frame so that you can install them on the bottom plate in the same arrangement.
That will ensure you keep all the smooth faces out
Once done you can start trimming the ducts off with flush cutters
Trim all the pieces connecting the ducts until you’re left with only the ducts
